
CONSTRUCTION DE ROBOTS DANS LES ANNÉES 50
Nous tenons pour acquis tous les moteurs, capteurs, batteries à haute densité de puissance et microcontrôleurs contenus dans les robots expérimentaux d’aujourd’hui. Le servomoteur d’avion modèle que tant de constructeurs utilisent comme base de leurs conceptions de robots était encore dans le futur il y a 60 ans. À cette époque, à part une trouvaille dans un magasin de surplus de guerre, il était difficile pour un expérimentateur de robots de trouver de bonnes pièces. Certaines des meilleures sources de pièces de robot étaient de vieux appareils tels que des machines à laver, des mixeurs, des ventilateurs électriques, des réfrigérateurs, des tourne-disques et des outils électriques 115 VAC. Les voitures avaient des ventilateurs, des moteurs d’essuie-glace et divers faisceaux de câbles. Les vélos avaient des chaînes, des roulements, des engrenages et même des rayons en acier trempé. Les bateaux et les moteurs de bateaux avaient d’excellentes pièces pour les robots. Les quincailleries avaient des charnières, de la quincaillerie pour portes et armoires, des articles de plomberie, des arbres et des tiges filetées.
Certaines des meilleures pièces provenaient des juke-box et des flippers. Tout ce qui contenait des pièces pouvant être déplacées avait généralement quelque chose d’utile pour les constructeurs de robots. Ayant grandi dans une petite ville (Mount Olive, Caroline du Nord), mes sources de pièces de robot étaient des boîtes de café vides et des sections de conduits de chauffage pour les coques de robots, les structures en contreplaqué et diverses choses étranges provenant de dépotoirs. J’ai également eu accès à des pièces de jukebox et à d’autres objets en surplus que mon frère a obtenus dans la grande ville de Raleigh. Plus tard, lorsque j’ai déménagé à Long Beach, en Californie, près de Los Angeles, j’étais au paradis des constructeurs de robots.
Notez que je n’ai mentionné aucune sorte d’électronique. Bien sûr, il n’y avait pas d’ordinateurs et donc pas d’imprimantes, de disques durs et autres éléments similaires. Certes, il n’y avait pas de microcontrôleurs ou de pilotes de moteur prêts à l’emploi à la disposition des expérimentateurs. Les machines de bureau se composaient généralement de machines à écrire, de polycopiés et de divers types de machines à additionner, et comportaient peu de pièces utilisables pour les robots. À l’époque, l’électronique de divertissement était constituée de radios, de téléviseurs, de projecteurs de films, de phonographes et d’amplificateurs et de haut-parleurs associés à ces articles. La plupart des produits électroniques étaient câblés à la main de point à point et les gros condensateurs, transformateurs et autres composants pouvaient être retirés pour les projets. L’expérimentateur de robots était généralement laissé à sa propre imagination lorsqu’il s’agissait d’utiliser ces types de pièces pour les robots.
PREMIERS CONCEPTIONS DE ROBOT
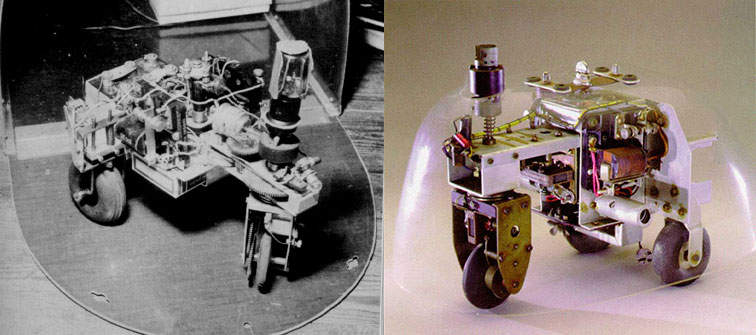
Les robots étaient souvent construits sur des bases en contreplaqué, maintenus ensemble par des vis à bois, des clous et de la colle dans les années 50. La plupart des créations robotiques antérieures étaient assez grandes, le bois semblait donc naturel pour les carapaces des robots. Il y avait peu de sources d’extrusions d’angle en aluminium, donc la plupart des gens utilisaient de l’acier pour les structures internes. Les roues peuvent provenir de tondeuses à gazon, d’un scooter occasionnel, d’un gros jouet ou de patins à roulettes. La plupart des moteurs disponibles pour les expérimentateurs n’étaient pas démultipliés, donc des systèmes de réduction à courroie et à chaîne reliaient les moteurs aux roues. La plupart des premières conceptions de robots utilisaient le type de direction « Ackermann » qui est utilisé dans toutes les voitures au lieu du type de direction différentielle populaire aujourd’hui dans les robots. Dans cette configuration, les roues arrière (ou avant) étaient utilisées pour le mouvement avant ou arrière et deux des roues étaient reliées entre elles pour se diriger à droite ou à gauche par un autre moteur de « direction ». Parfois, une seule roue était dirigée par un moteur de direction et cette seule roue pouvait également être alimentée par un moteur d’entraînement. La figure 1 montre le robot Elmer de Gray Walter et les engrenages qui entraînent la roue avant dans cette configuration.


There is a way out of every box, a solution to every puzzle; it’s just a matter of finding it.
JEAN-LUC PICARD

No Comments